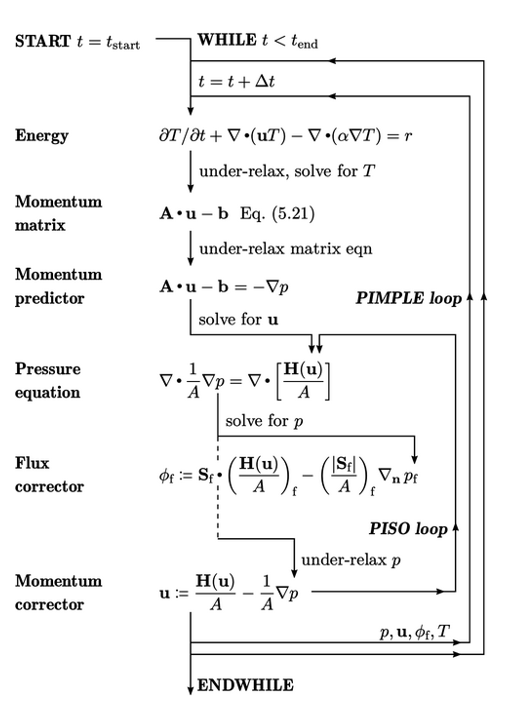
Algoritma PIMPLE. Algoritma kopling p-u dalam Bagian 5.12 dan Bagian 5.19 dapat digabungkan menjadi sebuah algoritma yang dikenal sebagai PIMPLE. PIMPLE menggabungkan kontrol dari PISO dan SIMPLE (oleh karena itu singkatan yang digabungkan), khususnya loop iteratif dan under-relaxation.
Semua kontrol bersifat opsional; algoritma transien standar direplikasi dengan menonaktifkan baik under-relaxation maupun loop PIMPLE. Dengan menyertakan loop PIMPLE, persamaan dipecahkan menggunakan variabel yang diperbarui dalam langkah waktu. Akurasi ditingkatkan terutama karena pembaruan koefisien matriks dari kontribusi  terhadap adveksi.
terhadap adveksi.
Untuk simulasi transien, akurasi temporal dapat dipertahankan pada tingkat yang lebih tinggi  (
( ) dengan menggunakan skema waktu orde kedua (Bagian 3.18) yang dikombinasikan dengan iterasi loop PIMPLE. Demikian pula, loop PIMPLE dapat memperbarui term-source eksplisit, misalnya dalam energi atau momentum, untuk meningkatkan akurasi.
) dengan menggunakan skema waktu orde kedua (Bagian 3.18) yang dikombinasikan dengan iterasi loop PIMPLE. Demikian pula, loop PIMPLE dapat memperbarui term-source eksplisit, misalnya dalam energi atau momentum, untuk meningkatkan akurasi.
Solusi semu-transien
PIMPLE dapat dikonfigurasi untuk menghasilkan solusi aliran stabil secara cepat dengan simulasi semu-transien. Simulasi ini tidak dimaksudkan untuk menangkap perilaku semu transien yang realistis sehingga dapat berjalan pada kecepatan rendah  dengan beberapa under-relaxation jika diperlukan.
dengan beberapa under-relaxation jika diperlukan.
Simulasi ini dapat dipercepat menuju keadaan stabil menggunakan langkah waktu lokal (LTS). LTS mengakui bahwa  dibatasi oleh maksimum
dibatasi oleh maksimum  yang terkait dengan sel yang memiliki
yang terkait dengan sel yang memiliki  kecil dan/atau |u| tinggi. LTS menggunakan medan
kecil dan/atau |u| tinggi. LTS menggunakan medan  yang sesuai dengan batas di setiap sel untuk mempercepat solusi semu transien. Meskipun menggunakan medan membuat solusi semu transien tidak valid, hal ini dapat diterima saat mencapai keadaan stabil pada
yang sesuai dengan batas di setiap sel untuk mempercepat solusi semu transien. Meskipun menggunakan medan membuat solusi semu transien tidak valid, hal ini dapat diterima saat mencapai keadaan stabil pada  .
.