Volume Kontrol Bergerak dan Tidak Berubah Bentuk
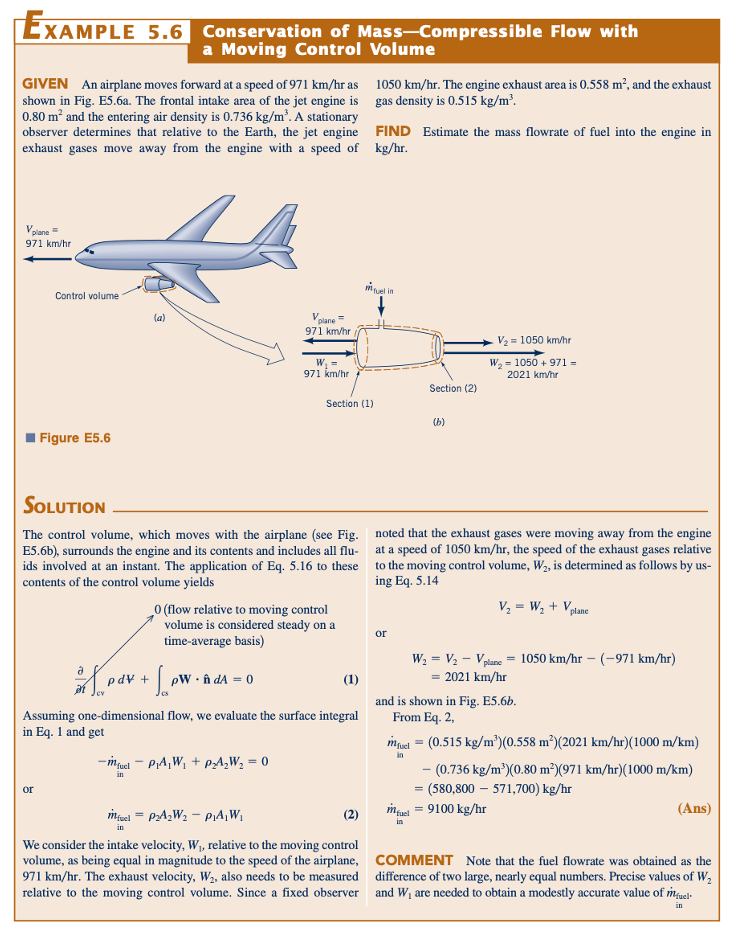
Volume kontrol bergerak dan tidak berubah bentuk. Kadang-kadang perlu menggunakan volume kontrol yang tidak berdeformasi yang terpasang pada bingkai referensi yang bergerak. Contohnya termasuk volume kontrol yang berisi mesin turbin gas di pesawat yang sedang terbang, cerobong asap kapal di laut, dan tangki bensin mobil yang sedang bergerak.

Seperti yang dibahas dalam Bagian 4.4.6, ketika menggunakan volume kontrol yang bergerak, kecepatan fluida relatif terhadap volume kontrol yang bergerak (kecepatan relatif) adalah variabel medan aliran yang penting. Kecepatan relatif, W, adalah kecepatan fluida yang terlihat oleh pengamat yang bergerak dengan volume kontrol. Kecepatan volume kontrol, Vcv, adalah kecepatan volume kontrol seperti yang terlihat dari suatu sistem koordinat tetap. Kecepatan absolut, V, adalah kecepatan fluida yang terlihat oleh pengamat diam dalam suatu sistem koordinat tetap. Kecepatan-kecepatan ini saling berhubungan oleh persamaan vektor

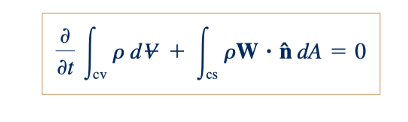
seperti yang diilustrasikan oleh gambar di pinggir. Ini sama dengan Persamaan 4.22, yang diperkenalkan sebelumnya. Untuk suatu sistem dan volume kontrol yang bergerak, tidak deformasi, yang bersamaan pada suatu saat, teorema transportasi Reynolds (Persamaan 4.23) untuk volume kontrol yang bergerak mengarah pada:
Beberapa contoh penerapan Persamaan 5.16 akan dijelaskan berikut.